
 The research of Wang Lab is focused on the following aspects.
The research of Wang Lab is focused on the following aspects.
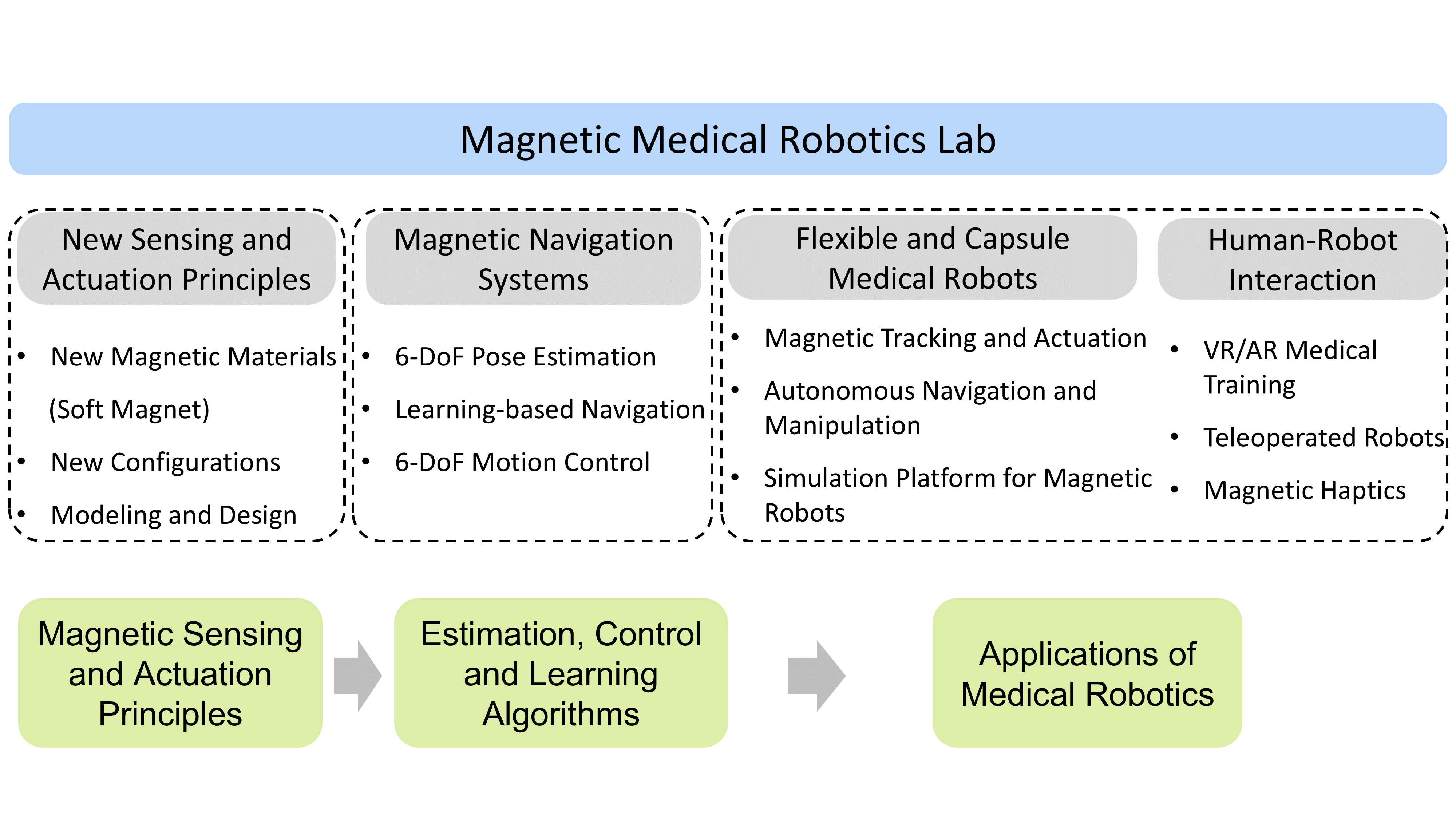
- Modeling and design of novel magnetic sensing and actuation principles, including new magnetic materials, structures and functions.
- Design of intelligent estimation, control, planning, and learning algorithms for magnetic navigation of medical robots.
- Design and development of magnetic navigation systems for 6-DoF pose/shape tracking, actuation, locomotion, and manipulation of multi-scale miniature medical robots.
- Design of simulation platform to facilitate research, development and application of magnetic robots in minimally invasive medicine.
Group News
2025
-
(May 30, 2025) Our paper titled “Active Electromagnetic Tracking System with Directionally Uniform and High Accuracy Using 2-DoF Orientation Control of the Magnetic Source” has been accepted by IEEE Transactions on Instrumentation and Measurement!
-
(May 21, 2025) We launched our commercial electromagnetic tracking system (MagTrack System) for precise surgical navigation on the 9th Nonlinear System and Control Conference, which was reported by Guangzhou Daily. 广州日报
2024
-
(Dec. 25, 2024) We hosted a seminar talk by Dr. Zonghu Han from University of Minnesota on “Long-term Organ Cryopreservation Technology for Transplantation”.
-
(Oct 20, 2024) Our paper titled “Soft-magnet-based Position Estimation Using an Approximate Extended Kalman Filter with a Hybrid Analytical-Neural Network Model” has been accepted by IEEE Transactions on Instrumentation and Measurement!
-
(Oct 8, 2024) Shuda Dong and Junhao Cui won the National Scholarship. Congratulations!
-
(June 30, 2024) Our paper titled “A Wireless 6-DoF Pose Tracking System Using a Triaxially Anisotropic Soft Magnet” has been accepted by IEEE/ASME Transactions on Mechatronics!
-
(June 26, 2024) Xinlei Zhang won the honor of Outstanding Thesis. Congratulations!
-
(June 26, 2024) Undergraduate research assistants in our lab, Xinlei Zhang, Yile Shen, Kuan Tian, Dekang Liu, Yifeng Zeng, have graduated with a bachelor’s degree. Congratulations and wish you a bright future!
-
(Jan. 05, 2024) Our paper titled “A Compact and Robust 6-DoF Pose Tracking System Using Magnetic-Inertial Sensors and a Single Uniaxial Electromagnetic Coil” has been accepted by IEEE Sensors Journal!
2023
-
(Dec. 04, 2023) Our conference paper titled “Active 6-DoF Electromagnetic Pose Tracking Using Orientation Control of the Magnetic Source” has been presented on 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO).
-
(Nov. 18, 2023) Our paper titled “Three-degrees-of-freedom orientation manipulation of small untethered robots with a single anisotropic soft magnet” has been accepted by Nature Communications and selected as the editors’ highlight paper in the area of “Applied Mathematics and Physics”! This work proposes a new soft-magnet-based magnetic actuation method and achieved full 3-DoF orientation manipulation of a single magnetic object, which is not feasible for existing permanent-magnet-based robots.
-
(Jul. 26, 2023) We hosted a seminar talk by Prof. Shuangyi Wang from the Institute of Automation, Chinese Academy of Sciences on “Practice and Exploration of Robotic Upgrades in Medical Diagnosis and Treatment Equipment”.
-
(Jun. 28, 2023) Our paper titled “A Virtual Ultrasonography Simulator for Skill Training Using Magnetic-Inertial Probe Tracking” has been accepted by IEEE/ASME Transactions on Mechatronics!
2022
- (Sep. 23, 2022) Our article “Identification of Workspace of the Soft-Magnet Based Position Tracking System for Medical Robots Using Parallel Experiments” has been accepted by IEEE Journal of Radio Frequency Identification and presented on 2022 International Conference on Digital Twins and Parallel Intelligence. This paper won the Best Application Paper Award!